研究成果
RESEARCH FINDINGS
 当前位置:
首页 >
研究成果
当前位置:
首页 >
研究成果
Guolin Yun*, Zesheng Chen, Zhuo Chen, Jinrui Chen, Binghan Zhou, Mingfei Xiao, Michael Stevens, Manish Chhowalla & Tawfique Hasan*
Nat. Mater. (2026) doi: https://doi.org/10.1038/s41563-026-02508-7
ABSTRACT
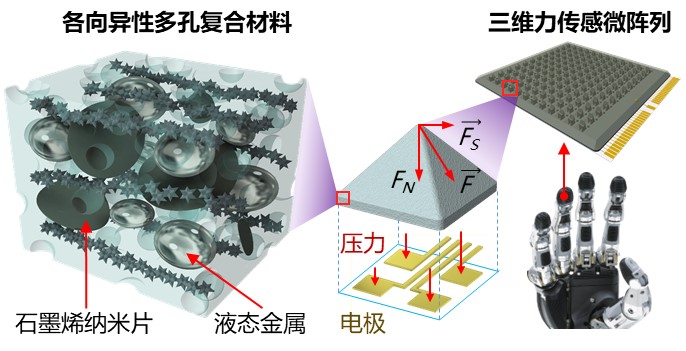
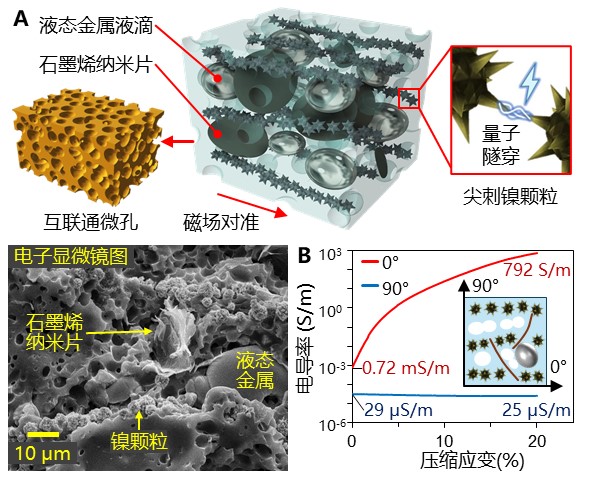
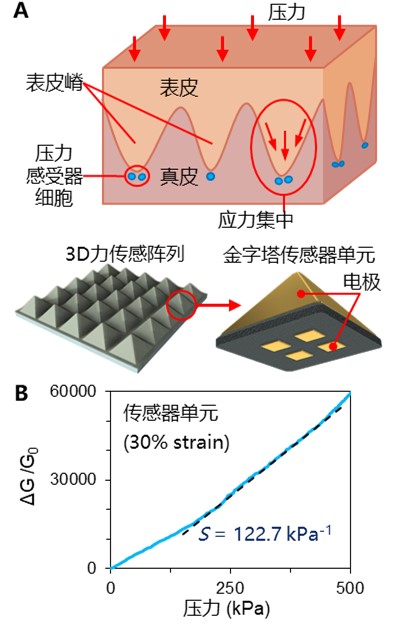
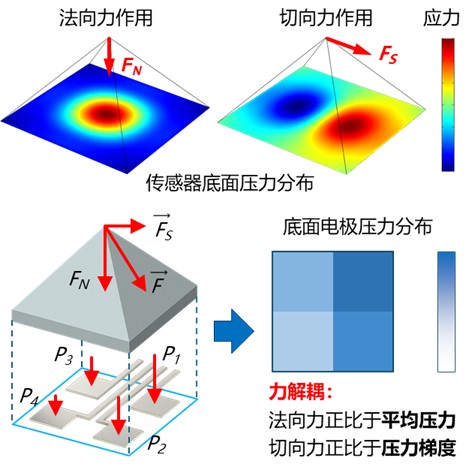
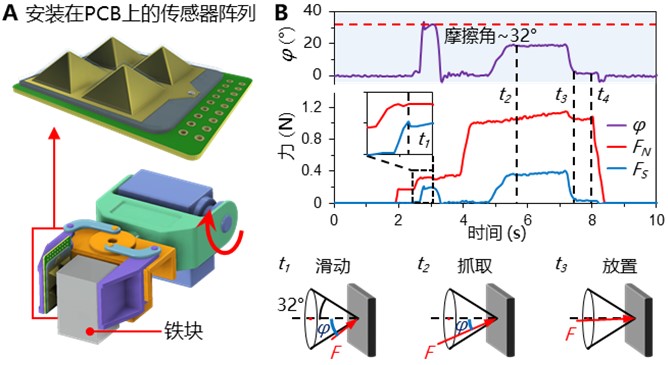
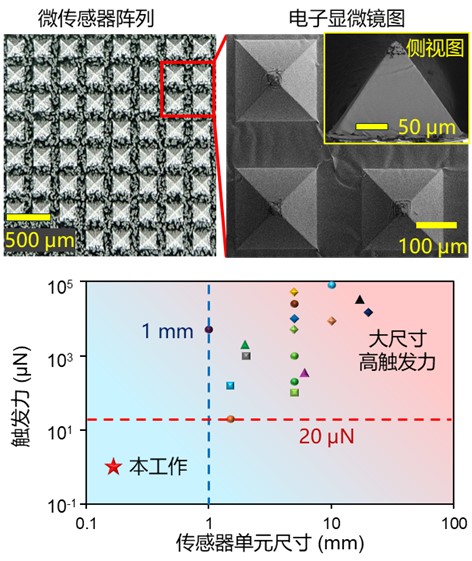
Flexible tactile sensors are pivotal for advancing neuroprosthetics, human–machine interactions and intelligent robotics. However, achieving highly sensitive tactile sensing to differentiate normal and tangential forces, particularly in mimicking the high-resolution multidimensional haptics of human fingers, remains a challenge. Here we propose a triaxial force microsensor array made from graphene–liquid-metal composites. Using anisotropic particle networks in microporous composites with pyramid geometries, we achieve normal–tangential force decoupling through multiscale structuring. Our approach offers exceptional sensitivity of 110 kPa−1 over a 500 kPa linear range (R2 > 0.998), with <2° force direction measurement deviation. The sensor array demonstrates force decoupling and slip detection via self-adjusted grasping of unknown objects. Our microsensor improves on the state of the art by an order of magnitude in size and detection limit, enabling 3D force sensing in micromanipulators and microrobots and unlocking advanced robotic dexterity.
灵活的触觉传感器对于推进神经假体、人机交互和智能机器人至关重要。然而,实现高度灵敏的触觉传感,以区分正常力和面内力,尤其是在模仿人类手指的高分辨率多维触觉方面,仍然是一项挑战。在这里,我们提出了一种由石墨烯-液态金属复合材料制成的三轴力微传感器阵列。我们使用具有金字塔几何的微孔复合材料中的各向异性颗粒网络,通过多尺度结构实现正常-面内力解耦。 我们的方法在 500 kPa 线性范围内提供了 110 kPa-1 的卓越灵敏度(R2>0.998),力方向测量偏差小于 2°。传感器阵列通过自适应抓取未知物体实现了力解耦和滑移检测。我们的微传感器在尺寸和检测极限方面实现了质的飞跃,使微机械手和微机械人能够实现 3D 力觉感知,并解锁高级机械手的灵巧性。