
研究方向
RESEARCH DIRECTION
研究方向:二维材料界面摩擦行为的理论计算研究
结构超滑是指两个晶体表面由于晶格失配导致的近零摩擦、磨损状态。二维材料因其独特的物理性质的各向异性(超强的层内共价键作用与较弱的层间范德华作用)呈现出天然优异的结构超滑特征,受到了科学与工业界的广泛关注。但目前基于二维材料的结构超滑具有微纳米尺度局限,如何在更大尺度实现结构超滑已成为研究瓶颈。关键难题在于伴随尺度增长,晶界、莫尔云纹以及弹性形变等因素耦合作用引入新的能量耗散通道,显著影响界面摩擦行为以致超滑失效。对此,基于大规模精确计算模拟与理论分析,开展相关的机理性研究具有重要的科学意义与实际应用价值。
鉴于此,本课题组开展二维材料界面摩擦行为的理论计算研究,具体研究方向包括:
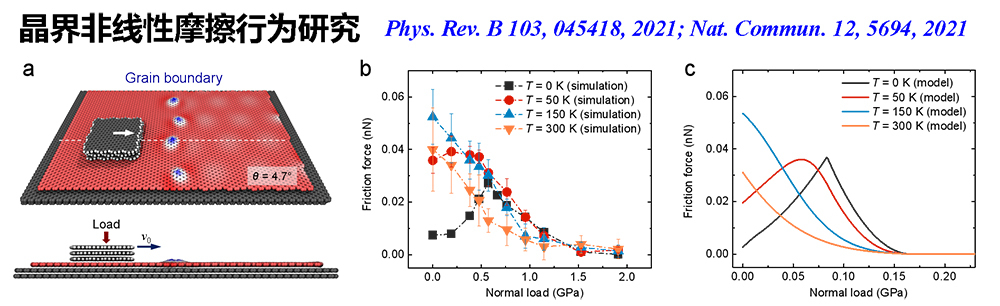
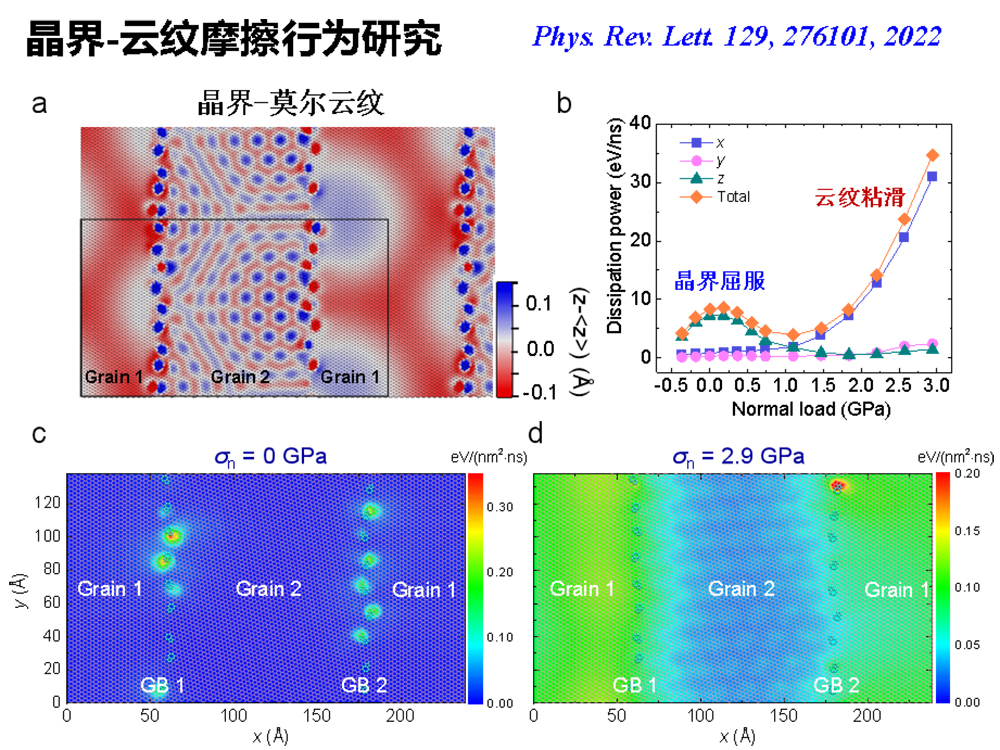
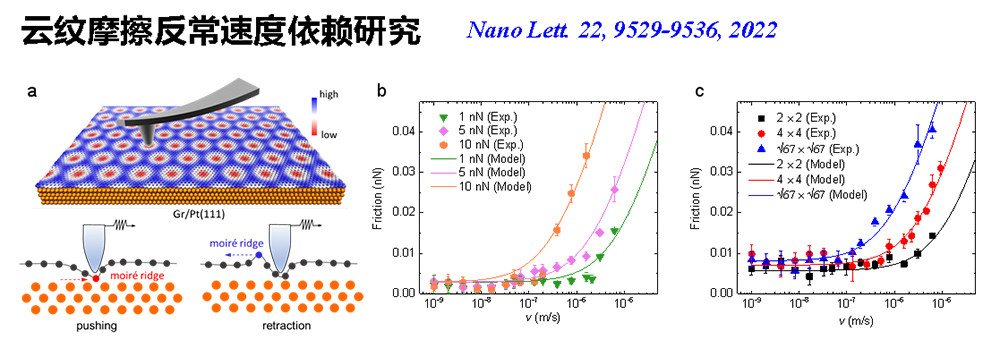
1.晶界与莫尔云纹的摩擦能量耗散机理
2.静/动摩擦的依赖关系与理论模型
3.各向异性层间力场与多尺度计算方法
4.基于大规模分子动力学模拟与理论分析,研究团队成功揭示了多晶界面摩擦能量耗散机理,阐释了晶界摩擦力的非单调行为与云纹粘滑现象,提出了晶界摩擦模型并获得了实验验证;阐明了单晶界面云纹补偿、钉扎效应与摩擦力反常速度依赖机理,构建了标度率通用理论模型;开发了可准确描述过渡金属硫化物体系的准确各向异性层间力场。研究成果解决了阐释多因素耦合影响二维材料界面摩擦的物理机制难题,为设计大尺度超滑体系提供了理论指导,并为进一步研究界面多尺度摩擦行为奠定了基础。

代表性研究成果:
1. X. Gao, W. Ouyang, O. Hod, and M. Urbakh*, Mechanisms of Frictional Energy Dissipation at Graphene Grain Boundaries, Phys. Rev. B. 103, 045418 (2021).
http://doi.org/10.1103/PhysRevB.103.045418 查看文件
2.X. Gao, W. Ouyang, M. Urbakh*, and O. Hod, Superlubric Polycrystalline Graphene Interfaces, Nat. Commun. 12, 5694 (2021).
https://doi.org/10.1038/s41467-021-25750-w 查看文件
3.X. Gao, M. Urbakh*, and O. Hod, Stick-Slip Dynamics of Moiré Superstructures in Polycrystalline 2D Material Interfaces, Phys. Rev. Lett. 129, 276101 (2022).
http://doi.org/10.1103/PhysRevLett.129.276101 查看文件
4.Y. Song#, X. Gao#, A. Hinaut, S. Scherb, S. Huang, T. Glatzel, O. Hod, M. Urbakh*, and E. Meyer*, Velocity Dependence of Moiré Friction, Nano Lett. 22, 9529-9536 (2022).
http://doi.org/10.1021/acs.nanolett.2c03667 查看文件
5.W. Yan#, X. Gao#, W. Ouyang*, Z. Liu*, O. Hod, and M. Urbakh, Shape-Dependent Friction Scaling Laws in Twisted Layered Material Interfaces, J. Mech. Phys. Solids. 185, 105555 (2024).
http://doi.org/10.1016/j.jmps.2024.105555 查看文件
研究方向:粘弹性体摩擦、界面润湿及摩擦调控
粘弹性体由于其独特的材料属性被广泛应用在装备密封、轮胎、雨刮器、软体机器人及医疗器械等中。在不同应用背景下对粘弹性材料的接触和摩擦行为的要求也不尽相同,而各领域中对粘弹性体服役性能的不同要求本质上是对粘弹性接触界面问题的研究。
研究主要包括:
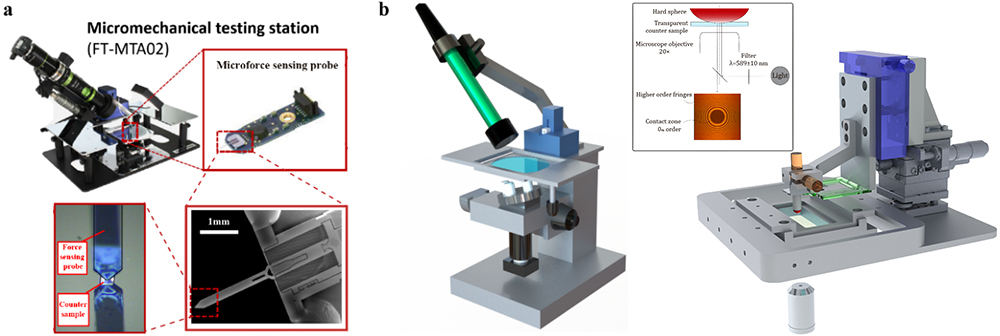
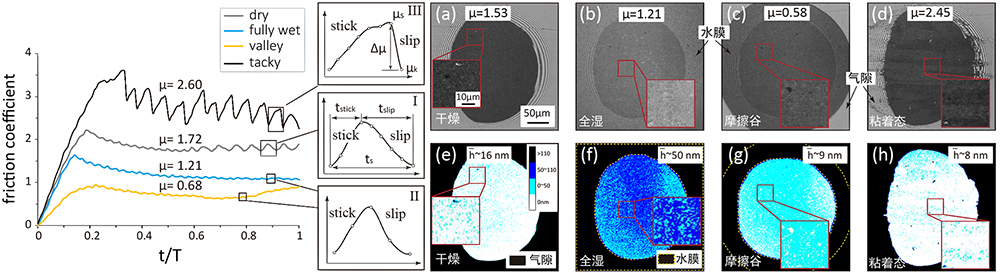
1.粘弹性体接触界面黏附及摩擦行为测量,通过原位测量技术结合光干涉法实时观测接触形貌
2.利用共聚焦显微镜、原子力显微镜等设备进行表面形貌及润湿性的表征测量
3.基于图像处理手段、MATLAB计算分析等手段进行接触轮廓、真实接触面积及水膜厚度的表征
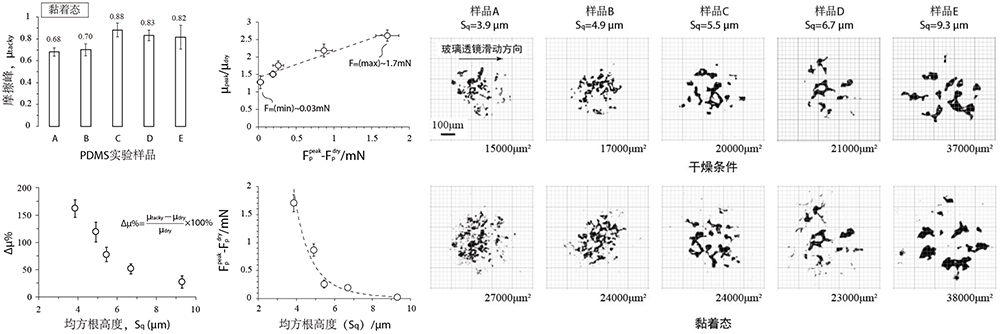
4.探究表面材料及结构特性对粘弹性体接触界面的黏附及摩擦行为的调控机理
代表性研究成果:
1. Gao T, Ye J, Zhang K, Liu X, Zhang Y, Liu K. Role of capillary adhesion in the friction peak during the tacky transition. Friction 2021.
https://doi.org/10.1007/s40544-021-0524-2. 查看文件
2.Gao T, Liu K, Zhang K, Song Q, Ye J, Liu X. Transient High Friction Dominated by High Shear Strength Residual Water Film. Tribol Lett 2022;70:29.
https://doi.org/10.1007/s11249-022-01569-4. 查看文件
3.Gao T, Zhang K, Liu X, Liu K, Ye J. Linking macroscale frictional properties to nanoscale water capillary bridges. Tribol Int 2022;174:107696.
https://doi.org/10.1016/j.triboint.2022.107696. 查看文件
4. Gao T, Zhang K, Wang Y, Liu K, Liu X, Ye J. Contribution of meniscus force to friction of multi-asperity sliding contact. Tribol Int 2023;177:107994.
https://doi.org/10.1016/j.triboint.2022.107994. 查看文件
研究方向介绍:可控粘附材料的结构设计、性能调控
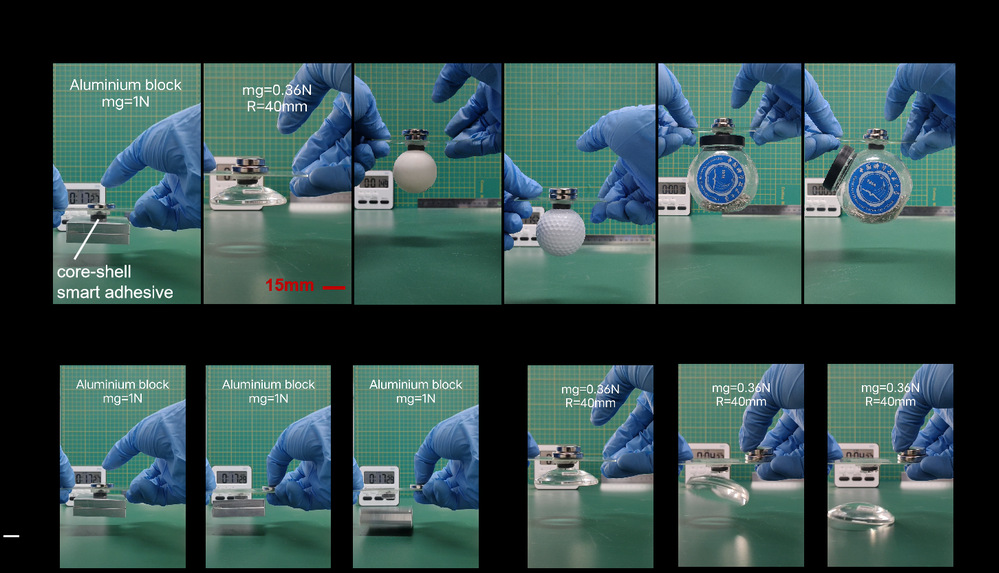
可控粘脱附是指粘附材料在粘附过程中粘附力大小变化以及粘附/脱附切换的可控性。在实际应用中,粘附与脱附过程对于控制特定对象至关重要,因此,粘附材料需要在粘附时具有强粘附力,在脱附时能轻松脱附,以实现对目标物体的有效粘附和控制,以及方便再次使用。壁虎在捕食和逃跑的过程中表现出的快速粘附和脱附能力,是通过对其刚毛末端施加预压力-切向拖拽,以实现最大切向摩擦粘附力,再沿一定角度撕脱,使切向粘附力降低而实现脱附。我们的研究重点包括以下几个方面:
生物启发设计:我们通过仿生学方法设计并制造人工微结构,模拟壁虎和瓢虫等生物体表面微结构的形态和排列方式。利用先进的纳米制造技术和材料工程方法,制备具有所需形状和性能的微结构材料。这些材料可能包括碳纳米管、磁性材料等,以确保所设计的微结构具有优异的粘附性能和磁响应性。这些微结构具有特殊的形状和尺寸,以最大程度地增强范德华力的作用,从而实现在各种表面上的高效粘附。

磁场调控技术:我们采用磁性材料和磁场调控技术,实现对粘附行为的精确调控。通过施加外部磁场,我们可以调节粘附材料的粘附力和释放力,从而实现在不同表面上的可控粘附和脱附,拓展了粘附技术的应用领域和功能。
代表性研究成果:
1.Yang, X., Zhong, H., Zhang, P., Wang, T., Zhang, Y., Gu, P., & Zhao, Y. (2021). Ladybug Inspired Double‐Layered Adhesive with Enhanced Robustness of Surface Roughness. ChemistrySelect, 6(4), 640-646.
https://doi.org/10.1002/slct.202004610 查看文件
2.Wang, Tao, et al. Rapidly switchable double-layered adhesive modified by magnetic field. Chemical Engineering Journal 438 (2022): 135441.1.
https://doi.org/10.1016/j.cej.2022.135441 查看文件
研究方向:干粘附材料的性能、设计及制备研究
干粘附材料主要由高聚物制备,依赖范德华力而不是化学键与目标物体发生可重复粘附,且不会损坏材料表面以及不产生残留。由于范德华力普遍存在,对目标物体材料种类无特殊要求。但粘附材料由于接触界面边缘的应力集中以及对目标表面粗糙度十分敏感,所以制备能够产生可靠高强度粘附力的粘附材料仍然是一个挑战。另一方面,干粘附材料与传统胶黏剂不同,其主要目的是作为机械爪抓头或仿壁虎机器人的手足,需要反复粘合及脱附,所以一直以来对于可以控制粘附力大小的粘附材料需求很高。因此粘附材料的主要研究方向是追求对粗糙表面有较高适应性的粘附力可控的智能粘附材料。
研究内容包括:
1.结合实验与模拟结果确定弹性体粘附界面的应力分布,分层模式和拉拔力的影响参数。
2.基于界面弹性能和表面能特性,分析弹性体对粗糙基板的适应性。
3.基于有限元分析对粘附材料结构,模量分布进行优化。
4.基于裂纹尖端的能量耗散,分析拉拔速度对粘附材料拉拔力的影响。
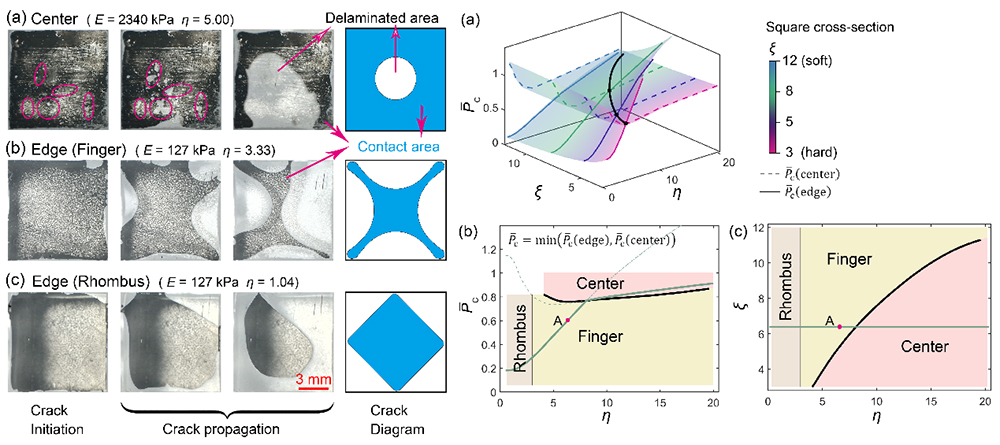
方形截面弹性体的分层模式和拉拔力
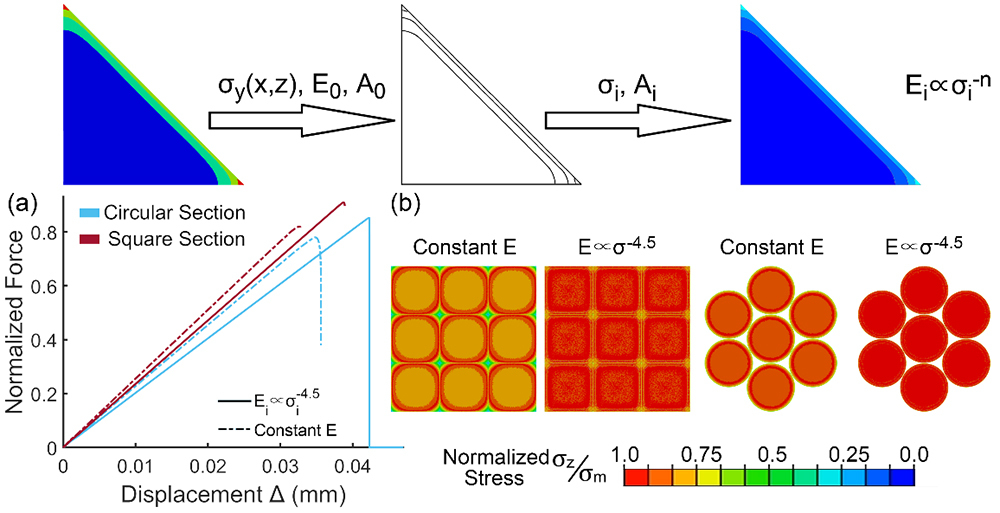
调节弹性体横向模量分布从而提高拉拔力
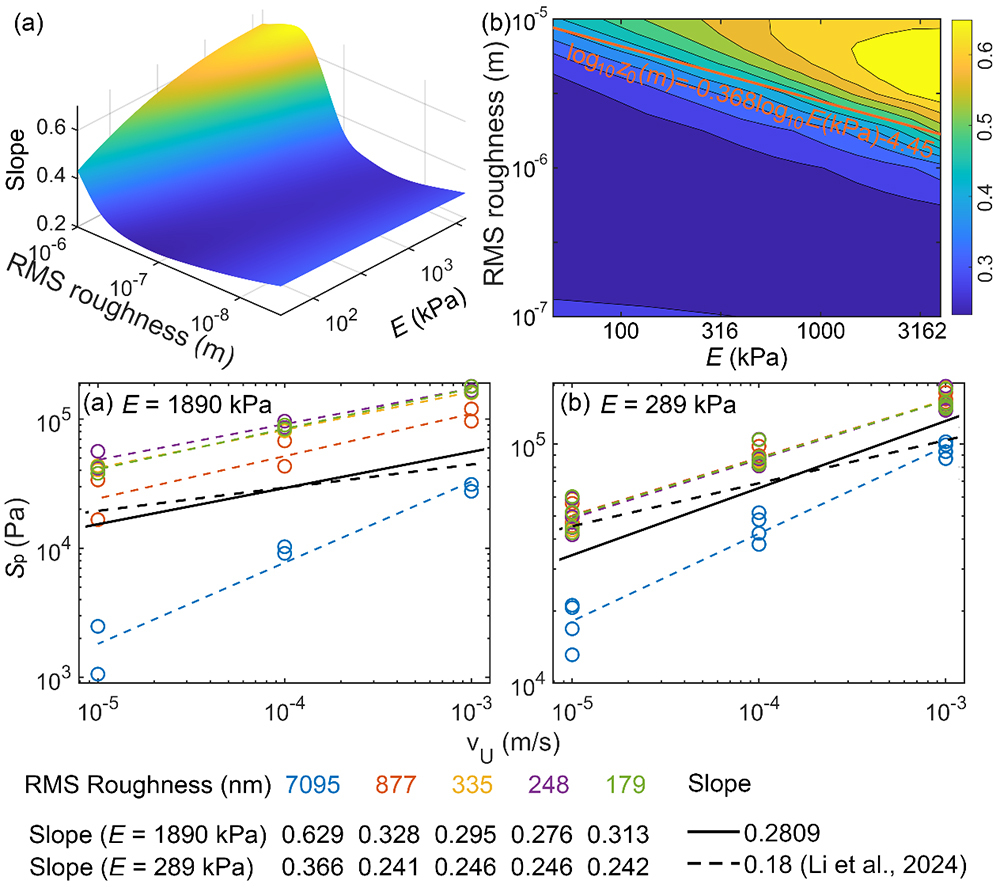
粗糙表面拉拔速度对粘附材料拉拔力的影响
成果列表:
1.Chen, ZiJian, Cheng, Gang, Zhu, YinBoWu, HengAnDong, ErBaoGu, PingZhao, Yang. Biomimetic polydimethylsiloxane (PDMS)/carbon fiber lamellar adhesive composite in thermal vacuum environment[J]. International Journal of Adhesion & Adhesives, 2021, 105(1).
https://doi.org/10.1016/j.ijadhadh.2020.102778 查看文件
2.Chen, Z., Zhao, Y., Wu, X., & Gu, P. Interface Stress Uniformity Design of Elastomer Adhesives. Advances in Transdisciplinary Engineering, 2023, 37, 364–371.
https://doi.org/10.3233/ATDE230161 查看文件
 当前位置:
当前位置: