
新闻
News

 当前位置:
首页 >
新闻
当前位置:
首页 >
新闻
如何让机器人拥有媲美人类指尖的多维触觉?中国科学技术大学联合英国剑桥大学,以“Multiscale-structured miniaturised 3D force sensors”为题在最新一期Nature Materials上发表论文,针对人形机器人等环境交互设备缺乏高空间分辨率三维触觉能力的痛点,研发了一种基于液态金属-石墨烯巨压阻复合材料,具有三轴力解耦结构设计的微型三维触觉传感器阵列,有效解决了当前机器人无法复现人类指尖的三维触觉感知精度的问题。该方法通过对材料和传感器的多尺度力学结构设计,实现了高线性灵敏度(R²>0.998,122/kPa)、微型化(单元尺寸200微米)、低检测极限(μN级)的三维力传感技术,以及滑动感知和粗糙度识别等复杂触觉功能,为下一代人机交互设备与精密操作技术提供了高效解决方案。
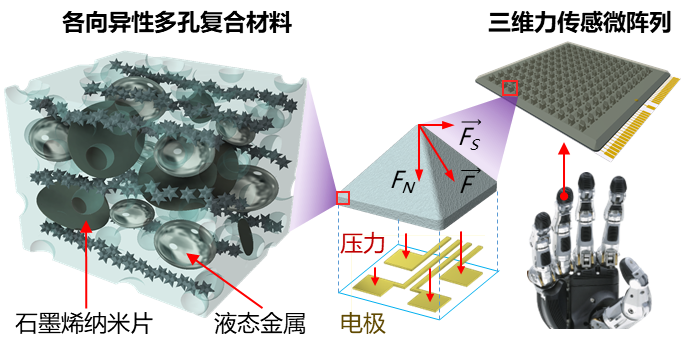
图一、具有多尺度结构的三维力传感阵列
得益于皮肤中密集分布的机械感受器细胞和三维力传感能力,人类指尖能精准感知压力、滑动甚至物体纹理。让机器人或假肢拥有媲美人类的三维触觉进而感知滑动、粗糙度等复杂接触信息,是实现其与物理世界安全、灵巧交互的核心挑战。然而,现有传感器因体积限制和性能不足(如灵敏度低、无法区分三维力方向),难以在机器人手指等狭小空间内复现人类皮肤的高空间分辨率三维触觉,严重制约了相关设备在未知环境中的操作能力。
01 多尺度材料结构实现各向异性高灵敏度
研究团队首先聚焦于材料创新,将多刺镍颗粒、石墨烯纳米片和液态金属复合于多孔PDMS基体中,并通过磁场定向排列镍颗粒,得到各向异性多孔弹性体(图二)。材料变形时,其动态固-液导电网络中的液态金属随基体形变保持导电接触,石墨烯则作为柔性电连接桥梁。结合多孔结构,材料沿颗粒排列方向的灵敏度显著提升,是其横向灵敏度的数百倍。这种“定向敏感”特性有效解决了困扰现有柔性传感器的横向干扰问题。
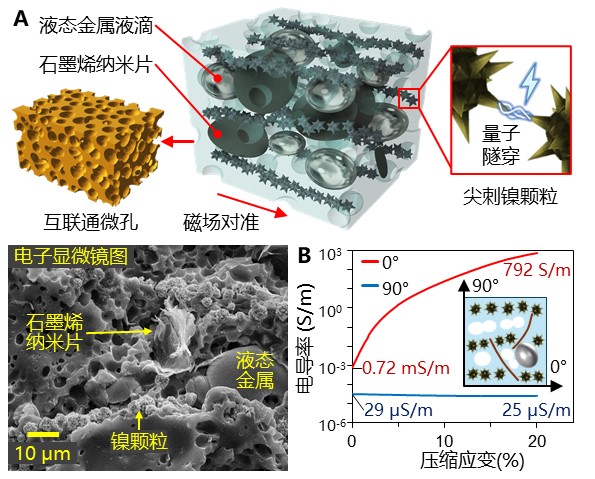
图二、复合材料的三维结构和各向异性电性能
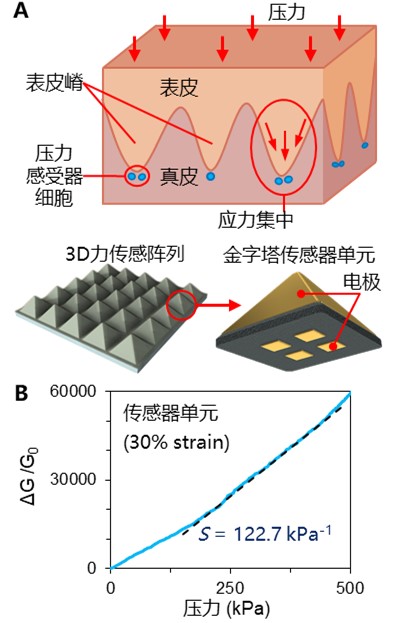
02几何补偿破解弹性材料非线性难题
受人体表皮的波浪状界面启发(图三),团队设计了金字塔形传感器单元。该结构可以调节传感器的非线性应力-应变曲线,与材料本身的非线性电导率-应变曲线耦合,巧妙地实现了线性的电导-压力响应(500 kPa量程内灵敏度122.7/kPa,R² > 0.998)。这种通过几何补偿克服弹性材料固有非线性响应的方法为柔性传感器设计提供了新思路。
03 基于金字塔结构的实时三维力解耦
更核心的突破在于传感器的三维力解耦能力。金字塔传感器在法向力和切向力下分别在底面产生对称偶函数和反对称奇函数的应力分布(图四)。通过传感器底部的四个电极测量压力,即可实时计算法向力(正比于压力均值)和切向力(正比于压力梯度矢量)。实验表明传感器的力方向测量误差<3°,力大小误差<3.1%。此外,传感器还能通过摩擦力突变检测滑动,并通过电位波动幅度估测表面粗糙度。
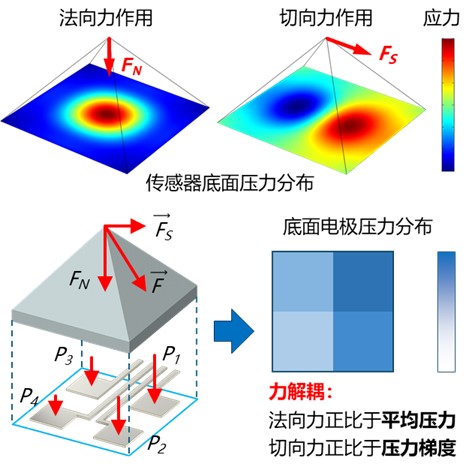
图四、传感器单元的三轴力解耦原理
为验证传感器性能,团队将一个4单元传感器阵列集成于机械臂夹爪(图五A)。在机械臂抓取测试中,传感器以11 mN(约1g重触发力)实现了纸筒的无损抓取,并通过剪切力测量其重量(误差3%)。对比商用传感器导致的纸筒变形,其具有明显的微小力操控优势。在另一项展示实验中,机械臂抓取未知物体并转移到未知高度平台上。传感器可实时识别物体的滑动并自主调整夹持力(t1,图五B),并智能识别平台接触以自动释放物体(t3,图五B),体现了传感器在未知环境中的强大适应能力。
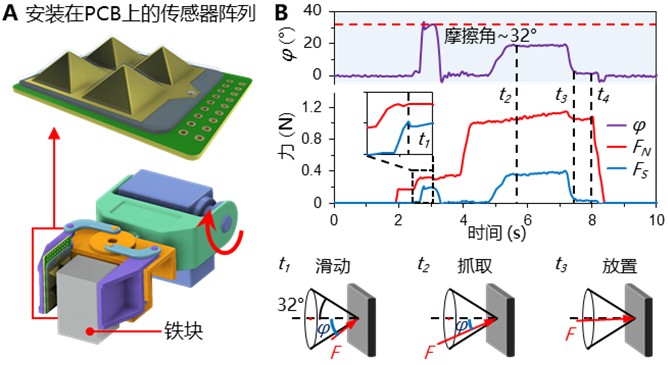
图五、(A)安装三维力传感阵列的机械臂。(B)机械臂实现铁块的智能转移。
团队进一步开发了单元尺寸仅200 μm的微型传感阵列(图六),其最低检测极限仅为一滴水重量的百分之一(μN级),远超世界先进水平,显示出媲美人类皮肤的高空间分辨率触觉感知能力。
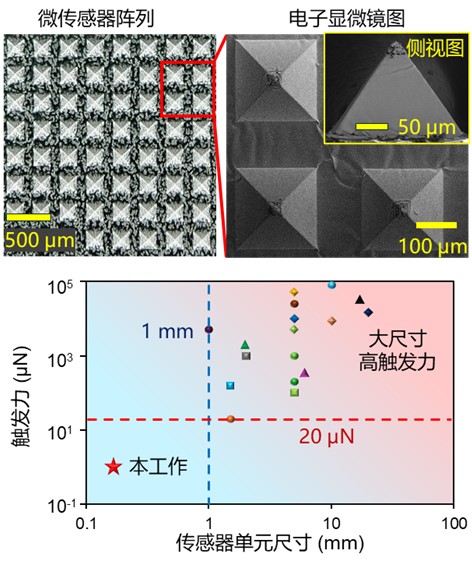
图六、微型传感器阵列及其性能
本研究通过多尺度材料结构和仿生力解耦结构设计,成功开发了高性能微型化三维力传感阵列,为机器人触觉、智能假肢和微型机械臂的环境交互提供了新方法。未来通过将单元尺寸缩小至50 μm以下,并集成温湿度传感功能,这类传感器有望在仿生皮肤领域开启更多可能性。
本研究论文第一作者为中国科大工程科学学院微纳米复合材料研究所贠国霖特任教授,通讯作者为贠国霖和剑桥大学Tawfique Hasan教授。



